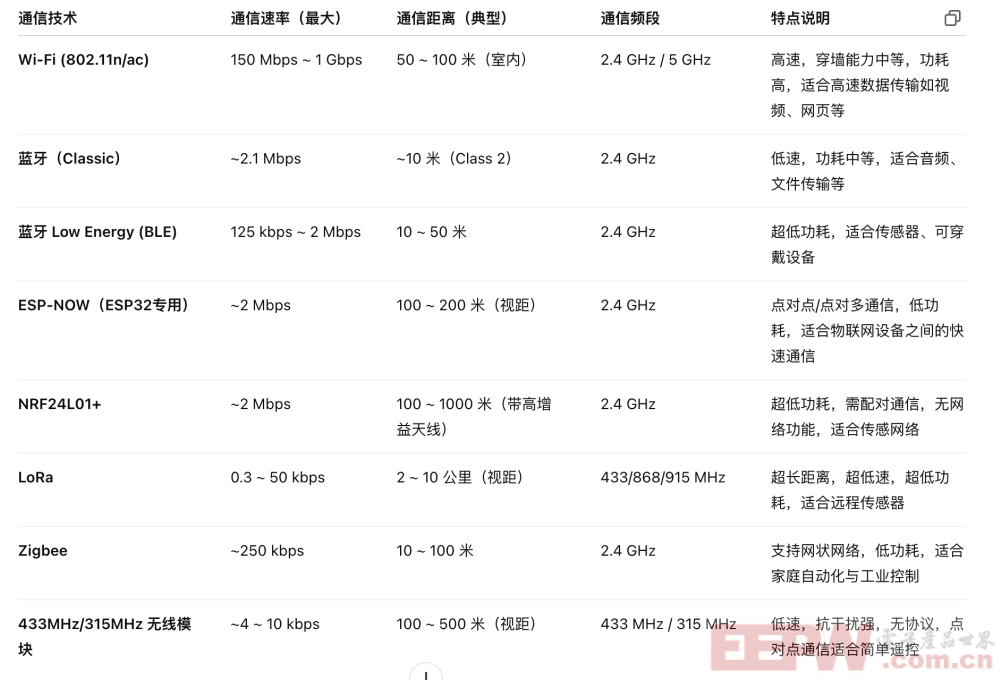
 提到了本文的地址:1最近我想要DIY二轮车(简单的交叉形遥控飞机),我还发现了当晚的许多视频,并进行了一些相关的简单研究(如果我这样做,我会分享,我没有经验)。电动机的例外根据MPU6050的态度计算PID并输出。另一个重要的事情是进行交流。飞机接收或发送远程控制说明,然后执行相应的数据或手势处理。因此,考虑了不同的数据传输方法。这是一个简短的比较。通信通信速率(最大)通信距离(典型)通信特征与以前关联。因此,我要求GPT研究常见的无人机通信解决方案。下表显示了与GPT生成的各种通信协议相对应的无人机应用程序的方向。 2沟通选择技术技术,因此后者是NRF24L01。根据淘宝商店的说法,空旷的沟通之间的距离可能达到约1,000米(这是距离很大的距离,即使人眼很远,也可能看不到)。上图显示了经典的NRF24L01。当然,中国还有许多其他2.4 g模块,例如NF-02-PA或NF-02-PE(使用SI24R1芯片)。但是,据认为,目前伴随着相应的库文件的财富。因此,我准备了两个不同的NRF24L01和ESP32,以使用Komthis Unication进行实验。 3驾驶步骤主要确定如何在IDF框架下通过NOPNOP2002/MIRF组件快速驱动2.4G模块:1。首先创建一个新的IDF项目,基于Clipboard Print中Hellowld View Plaincopy的以下内容? 1.依赖项:2.protocol_exampy_common:$ {idf_path}/examples/common_components/protocol_examples_common.common4.nopnop2002002/mirf:5.paTH:成分/mirf/6.git:https://github.com/nopnop2002/esp-idfmirf.git3。一次编译当前项目,并且组件管理器将自动下载Optfit:4。请访问https://github.com/nopnop2002/esp-idfmirf.git找到相应的示例。您可以在本地使用克隆,或直接复制文件内容。 5。使用menuconfi g配置2.4 G模块引脚模块的连接。 6。i -configure项目目录的kconfi g和menuconfig应用程序中的搜索conci gurationview platercopy to clipboardprint? 1.Menu“申请配置大量” 2.3.EndMenu方向。分别向发件人和接收器。这样,发件人的工作将根据地址FGHIJ发送数据,请参阅Platercopy到ClipboardPrint? 1. void发件人(void *pvparameter)2。{3.ESP_LOGI(pctaskgetName(null),“ start”); 4.NRF24_T DEV; 5.NRF24_Init(dev); 6.Uint8_t有效载荷= 32; config_radio_channel; 8.NRF24_CONFI G(开发,频道,有效载荷); 9.10 .//使用5个特征设置目标地址11.ESP_ERR_T RET = NRF24_SETTADR(DEV,(UINT8_T *)“ FGHIJ”); 12.if(ret!= esp_ok)13。“未安装NRF24L01”); 15.(1)16。{17.VtaskDelay(1); 18.} 19.} 20.21。#如果config_advanced22.advancedSettings。 priu32,nowtick); 33.NRF24_SEND(DEV,BUF); 34 .// vtaskdelay(1); 35.ESP_LOGI(pctaskgetName(null),“等待发送...”); 36。5.nrf24_in(dev)6。ESP_OK)13。错误)35.BREAK(DEV,BUF); ESP_LOG_BUFFER_HEXDUMP(pctaskgetName(null),buf,有效载荷,ESP_LOG_INFO); 47.} 48.VtaskDelay(1); //避免看门狗警报49。} 50.} 4实验奇迹5上面的摘要,我们主要使用NopNOP2002/Mirf库来快速强制执行和演示2.G模块的通信和奉献精神。目前,效果是STI非常好,并且与期望一致。但是,沟通的距离和稳定性仍然需要进一步拔河。 (本文源自“ EEPW” 202506)
提到了本文的地址:1最近我想要DIY二轮车(简单的交叉形遥控飞机),我还发现了当晚的许多视频,并进行了一些相关的简单研究(如果我这样做,我会分享,我没有经验)。电动机的例外根据MPU6050的态度计算PID并输出。另一个重要的事情是进行交流。飞机接收或发送远程控制说明,然后执行相应的数据或手势处理。因此,考虑了不同的数据传输方法。这是一个简短的比较。通信通信速率(最大)通信距离(典型)通信特征与以前关联。因此,我要求GPT研究常见的无人机通信解决方案。下表显示了与GPT生成的各种通信协议相对应的无人机应用程序的方向。 2沟通选择技术技术,因此后者是NRF24L01。根据淘宝商店的说法,空旷的沟通之间的距离可能达到约1,000米(这是距离很大的距离,即使人眼很远,也可能看不到)。上图显示了经典的NRF24L01。当然,中国还有许多其他2.4 g模块,例如NF-02-PA或NF-02-PE(使用SI24R1芯片)。但是,据认为,目前伴随着相应的库文件的财富。因此,我准备了两个不同的NRF24L01和ESP32,以使用Komthis Unication进行实验。 3驾驶步骤主要确定如何在IDF框架下通过NOPNOP2002/MIRF组件快速驱动2.4G模块:1。首先创建一个新的IDF项目,基于Clipboard Print中Hellowld View Plaincopy的以下内容? 1.依赖项:2.protocol_exampy_common:$ {idf_path}/examples/common_components/protocol_examples_common.common4.nopnop2002002/mirf:5.paTH:成分/mirf/6.git:https://github.com/nopnop2002/esp-idfmirf.git3。一次编译当前项目,并且组件管理器将自动下载Optfit:4。请访问https://github.com/nopnop2002/esp-idfmirf.git找到相应的示例。您可以在本地使用克隆,或直接复制文件内容。 5。使用menuconfi g配置2.4 G模块引脚模块的连接。 6。i -configure项目目录的kconfi g和menuconfig应用程序中的搜索conci gurationview platercopy to clipboardprint? 1.Menu“申请配置大量” 2.3.EndMenu方向。分别向发件人和接收器。这样,发件人的工作将根据地址FGHIJ发送数据,请参阅Platercopy到ClipboardPrint? 1. void发件人(void *pvparameter)2。{3.ESP_LOGI(pctaskgetName(null),“ start”); 4.NRF24_T DEV; 5.NRF24_Init(dev); 6.Uint8_t有效载荷= 32; config_radio_channel; 8.NRF24_CONFI G(开发,频道,有效载荷); 9.10 .//使用5个特征设置目标地址11.ESP_ERR_T RET = NRF24_SETTADR(DEV,(UINT8_T *)“ FGHIJ”); 12.if(ret!= esp_ok)13。“未安装NRF24L01”); 15.(1)16。{17.VtaskDelay(1); 18.} 19.} 20.21。#如果config_advanced22.advancedSettings。 priu32,nowtick); 33.NRF24_SEND(DEV,BUF); 34 .// vtaskdelay(1); 35.ESP_LOGI(pctaskgetName(null),“等待发送...”); 36。5.nrf24_in(dev)6。ESP_OK)13。错误)35.BREAK(DEV,BUF); ESP_LOG_BUFFER_HEXDUMP(pctaskgetName(null),buf,有效载荷,ESP_LOG_INFO); 47.} 48.VtaskDelay(1); //避免看门狗警报49。} 50.} 4实验奇迹5上面的摘要,我们主要使用NopNOP2002/Mirf库来快速强制执行和演示2.G模块的通信和奉献精神。目前,效果是STI非常好,并且与期望一致。但是,沟通的距离和稳定性仍然需要进一步拔河。 (本文源自“ EEPW” 202506)


 推荐文章
推荐文章









,我还发现了当晚的很多景色')){kind=link}
,我还发现了当晚的很多景色')){kind=link}
,我还发现了当晚的很多景色')){kind=link}
){kind=link}